Multicopterul este un vehicul aerian a carui miscare este controlata prin incetinirea sau accelerarea multiplelor unitati motor/elice.
Multicopterele sunt aerodinamic instabile si necesita controlul unui computer (controller de zbor). Ca rezultat, ele sunt sisteme « fly by wire » si cand computerul nu functioneaza, nu zboara. Controllerul de zbor combina datele adunate de la giroscopul si accelerometrul on-board pentru a mentine orientarea si pozitia.
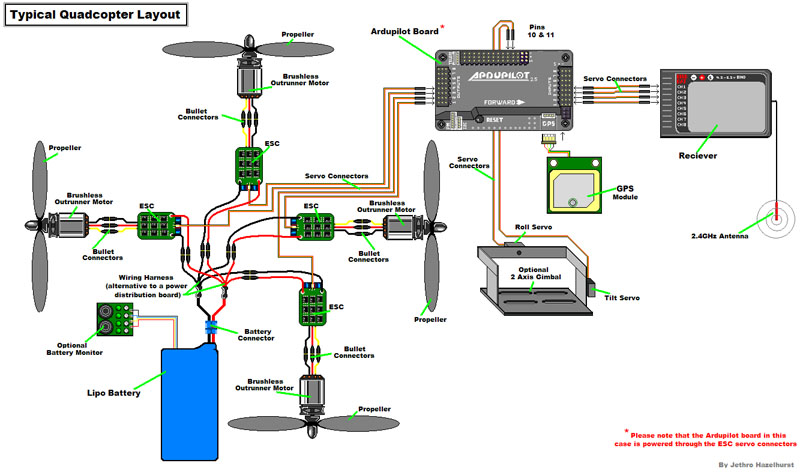
Quadcopterul este cel mai simplu model de multicopter, cu fiecare dintre cele 4 motoare rotindu-se in directie opusa fata de motoarele alaturate (adica motoarele din colturile opuse se rotesc in acceeasi directie). Quadcopterul isi controleaza miscarea pe orizontala (roll si pitch) accelerand 2 motoare de pe
golden goose fake o parte si incetinind celelalte doua motoare. Spre exemplu, quadcopterul se misca inspre stanga accelerand cele 2 motoare din dreapta si incetinind cele 2 motoare din stanga. La fel, pentru a inainta se vor accelera cele 2 motoare din spate si se vor incetini cele doua motoare din fata.
Quadcopterul se roteste (yaw) spre stanga sau spre dreapta accelerand doua motoare pozitionate in diagonala unul fata de celalalt si incetinind celelalte doua motoare.
Miscare orizontala este obtinuta accelerand sau incetinind dintre motoare astfel incat vehiculul sa se incline in directia miscarii dorite si accelerand toate motoarele astfel incat sa inainteze. In general, cu cat inclinarea este mai mare, cu atat mai mare este viteza de deplasare.
Altitudinea este controlata accelerand sau incetinind toate motoarele in acelasi timp.